Scegliere un buon motore può essere insufficiente se poi viene applicata una ruota troppo piccola. Non servono formule matematiche per capire che una ruota piccola deve fare molti più giri per percorrere la stessa distanza di una ruota grande. Un motore lento accoppiato a una ruota piccola difficilmente vi permetterà di avere i giusti tempi di reazione per recuperare l'equilibrio, mentre un motore veloce accoppiato a una ruota grande vi permetterà di raggiungere più facilmente il vostro obiettivo.
 Ci sono nella rete e in particolare su Youtube parecchi progetti dove si vedono ruote piccole: in realtà osservando bene la natura dei progetti, si potrà notare che la dimensione della ruota è spesso dimensionata alla massa dell'oggetto. Un oggetto grande e pesante tenderà potenzialmente a "correre di più" in caduta, e quindi per i motivi espressi nel precedente post, una ruota più grande migliorerà la stabilità.
Ci sono nella rete e in particolare su Youtube parecchi progetti dove si vedono ruote piccole: in realtà osservando bene la natura dei progetti, si potrà notare che la dimensione della ruota è spesso dimensionata alla massa dell'oggetto. Un oggetto grande e pesante tenderà potenzialmente a "correre di più" in caduta, e quindi per i motivi espressi nel precedente post, una ruota più grande migliorerà la stabilità.
Vorrei far notare come tanti video in realtà mostrano dei self balancing robot che operano su un tappeto o comunque su una superficie morbida. La superficie morbida incrementa moltissimo la stabilità perchè da una parte rallenta tutti i movimenti compresa la caduta, e dall'altra permette il mantenimento dell'equilibrio senza applicare forze sul robot. Se non siete convinti, prendete un uovo e provate a farlo stare in equilibrio su una piastrella, poi provate sulla sabbia. Oppure provate ad andare con la bicicletta nella ghiaia. Il principio è lo stesso.
Ovviamente l'obiettivo del progetto è riuscire a mantenere in equilibrio il robot sulla peggior superficie esistente, ovvero quella perfettamente liscia.
Il secondo problema della superficie liscia è dovuto allo scivolamento della ruota, che a causa dell'elevata coppia del motore si trovata a scaricare a terra un'enorme forza che deve trovare riscontro in un ottimo attrito con la superficie. La migliore ruota è quella gommata, perchè detta in parole povere "non sgomma".
Sui siti di robotica si trovano molti tipi di ruote: quelle più semplici sono ruote in plastica che non dispongono di un mozzo fissabile all'albero motore tramite una vite, sono ruote adatte per lo più a robot a 3 o 4 ruote, con motori abbastanza deboli.
Esistono poi in commercio ruote per così dire professionali, dove l'accoppiamento con l'albero motore è fatto tramite un mozzo in metallo.
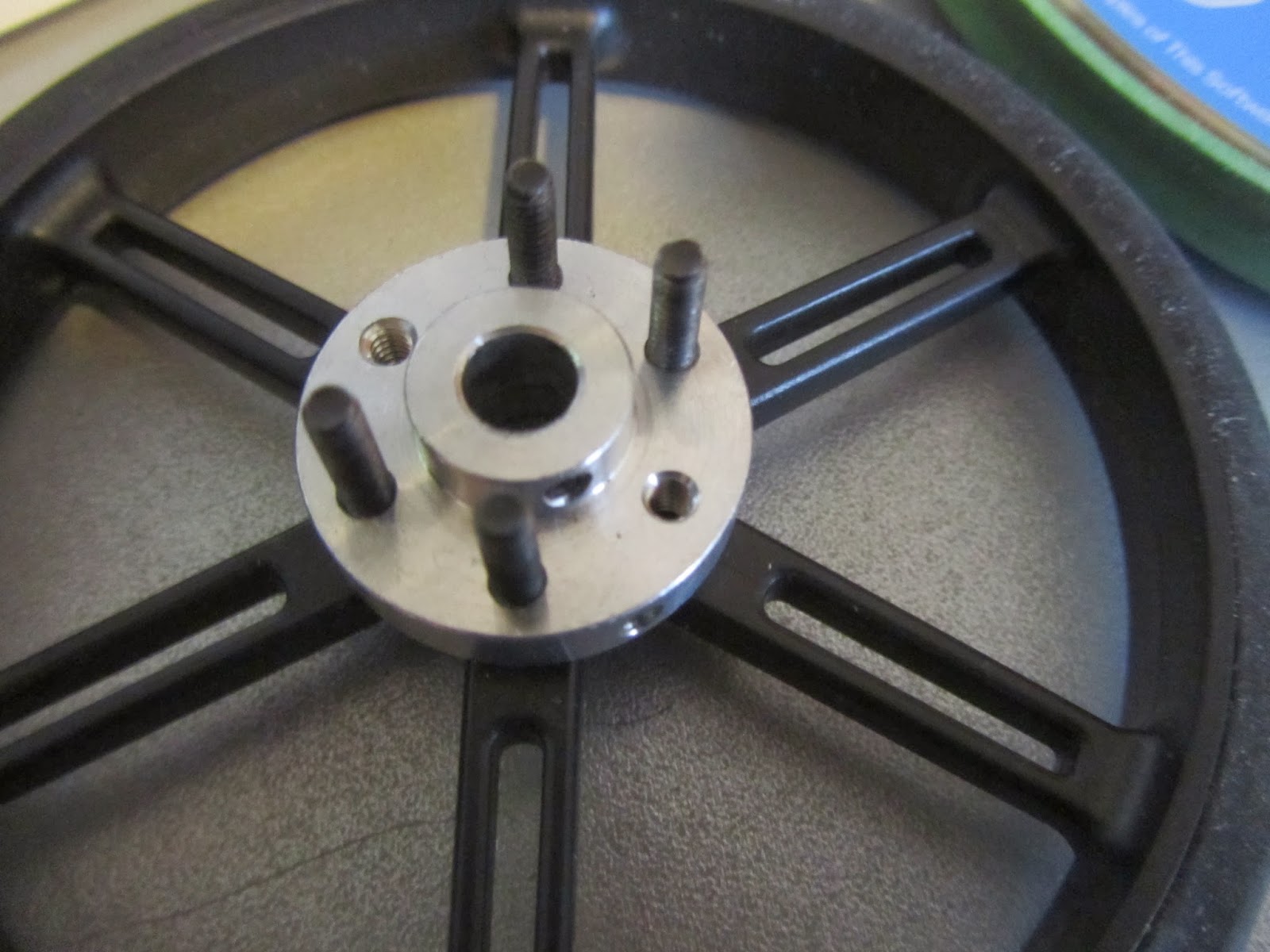
 Non tutte le ruote si accoppiano a tutti i motori, ovviamente il parametro base da controllare è il diametro dell'albero. La terminazione dell'albero è inoltre di forma diversa: molto comune è la terminazione a "D" come è il caso dei motori Pololu. Nella foto si può notare la ruota gialla, il cui profilo è stato modificato per ospitare l'albero del motore Pololu, il tutto rinforzato artigianalmente con una vite di fissaggio perpendicolare all'albero. La ruota a raggi nera in foto è una ruota Pololu da 90mm (http://www.pololu.com/product/1435) accoppiata tramite un mozzo dedicato in metallo, predisposto per un profilo a "D" da 6mm.
Non tutte le ruote si accoppiano a tutti i motori, ovviamente il parametro base da controllare è il diametro dell'albero. La terminazione dell'albero è inoltre di forma diversa: molto comune è la terminazione a "D" come è il caso dei motori Pololu. Nella foto si può notare la ruota gialla, il cui profilo è stato modificato per ospitare l'albero del motore Pololu, il tutto rinforzato artigianalmente con una vite di fissaggio perpendicolare all'albero. La ruota a raggi nera in foto è una ruota Pololu da 90mm (http://www.pololu.com/product/1435) accoppiata tramite un mozzo dedicato in metallo, predisposto per un profilo a "D" da 6mm.  Tuttavia anche in questo caso mi sono reso conto che una ruota di diametro maggiore avrebbe migliorato le cose, ma in commercio è molto raro trovare ruote di diametro maggiore a 90-100mm. La soluzione in questo caso è stata la classica formula DIY: utilizzare qualcosa che già possedevo e riutilizzarlo. Nelle foto seguenti potete vedere come con 5 semplici DVD, un mozzo in metallo e un elastico da pacco si possa facilmente realizzare una solida ed efficiente ruota. I 5 sono sovrapposti e incollati in asse tra di loro, tramite colla cianocrilato (Attack) e fissati al mozzo con 4 viti passanti. La circonferenza è ricoperta da un elastico da pacco, anch'esso incollato a regola d'arte.
Tuttavia anche in questo caso mi sono reso conto che una ruota di diametro maggiore avrebbe migliorato le cose, ma in commercio è molto raro trovare ruote di diametro maggiore a 90-100mm. La soluzione in questo caso è stata la classica formula DIY: utilizzare qualcosa che già possedevo e riutilizzarlo. Nelle foto seguenti potete vedere come con 5 semplici DVD, un mozzo in metallo e un elastico da pacco si possa facilmente realizzare una solida ed efficiente ruota. I 5 sono sovrapposti e incollati in asse tra di loro, tramite colla cianocrilato (Attack) e fissati al mozzo con 4 viti passanti. La circonferenza è ricoperta da un elastico da pacco, anch'esso incollato a regola d'arte.
Nel prossimo post: il controller dei motori e la calibrazione.
Nessun commento:
Posta un commento